
Imaginez un robot capable de galoper comme un chien, sans le moindre moteur traditionnel intégré. C’est l’exploit réalisé par des chercheurs de TU Delft et de l’EPFL, réunis autour du projet PAWS.
Ce robot quadrupède s’inspire directement des synergies de locomotion animales observées chez les chiens. Grâce à un jeu complexe de câbles et de ressorts, il reproduit des allures naturelles sans recourir à l’électronique classique.
PAWS impressionne par sa capacité à combiner des mouvements passifs et actifs de manière fluide. Ce système, basé sur l’étude du comportement mécanique animal, redéfinit la mobilité des machines autonomes. Il ne s’agit plus de programmer chaque articulation, mais d’optimiser un mouvement global inspiré de la nature.

S’inspirer de la nature pour simplifier le contrôle
Les chercheurs ont cherché à imiter les propriétés physiques des chiens pour développer un robot plus efficient. Ils ont observé que les quadrupèdes utilisent des tendons élastiques et une coordination musculaire unique. En analysant ces mouvements, l’équipe a identifié des synergies communes à travers une étude de l’activité articulaire.
L’élément clé repose sur l’analyse en composantes principales (ACP), qui a révélé quatre synergies dominantes. Ces combinaisons motrices ont été intégrées dans la conception du robot afin de réduire le besoin d’actionneurs complexes. En utilisant uniquement quatre moteurs pour douze articulations, PAWS montre que la simplification peut mener à des performances élevées.
Une marche fluide, robuste et adaptative
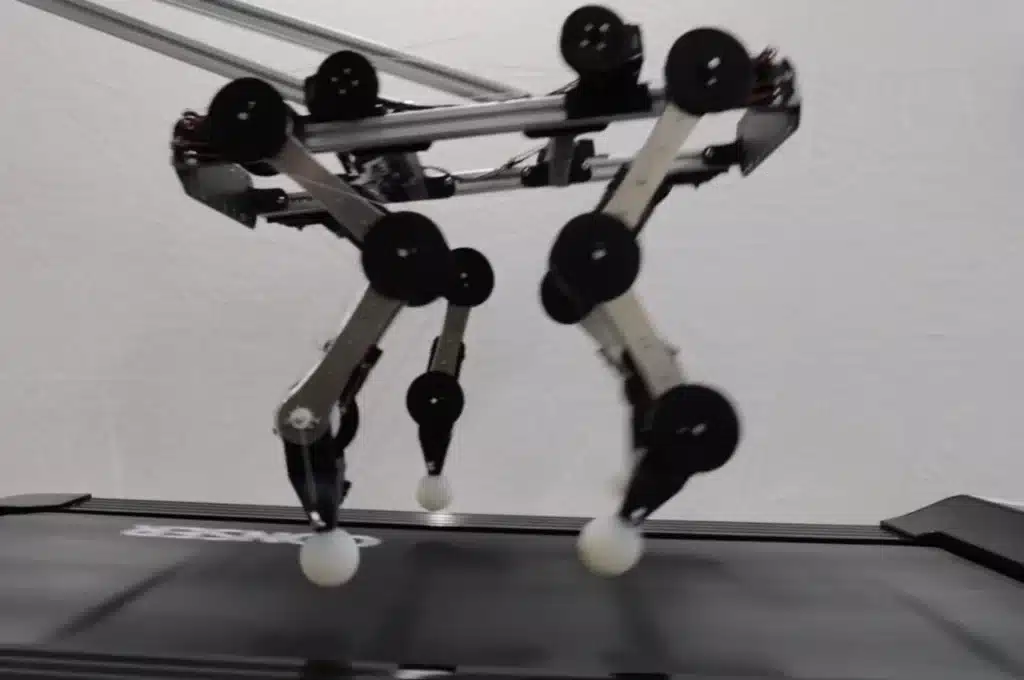
Lors de tests sur tapis roulant, le robot sans moteur a présenté une démarche autonome, sans intervention électronique. Sa structure, conçue autour d’un routage précis des tendons, produit des allures spontanées réalistes. De ce fait, le galop, la marche ou même la position assise sont déclenchés par les seules interactions mécaniques.
En cas de perturbation, PAWS retrouve son équilibre en moins d’un cycle de marche. Cette résilience repose sur une architecture mécanique souple, capable d’absorber les chocs sans déséquilibre. Il illustre ce que les chercheurs appellent l’« intelligence incarnée », où la structure elle-même fait office de cerveau partiel.
Des applications bien au-delà de la locomotion
Les implications de PAWS dépassent le cadre de l’expérimentation robotique académique. Ce type de robot pourrait intervenir dans des milieux instables ou hostiles, comme les zones sinistrées. Son autonomie mécanique le rend moins dépendant de capteurs ou d’ordinateurs embarqués fragiles.
L’exploration de terrains irréguliers, les missions de sauvetage ou l’assistance logistique sont des domaines prometteurs. Grâce à son efficacité énergétique et sa stabilité, PAWS pourrait aussi accompagner les humains dans des environnements urbains complexes. Il montre donc que la robotique peut apprendre de la nature sans forcément la surcharger de technologies numériques.
Les chercheurs envisagent désormais d’y intégrer une forme de prise de décision cognitive embarquée. L’objectif serait de permettre à PAWS de réagir intelligemment aux variations de son environnement. Cette fusion entre mécanique bioinspirée et perception adaptative ouvre un nouveau chapitre dans l’histoire des robots quadrupèdes.
PAWS n’imite pas seulement le chien : il démontre qu’observer la nature peut transformer l’ingénierie. Et si la prochaine génération de robots était, simplement, moins électronique et plus vivante dans ses mouvements ?
- Partager l'article :



