
La robotique mobile évolue grâce à des systèmes autonomes capables d’opérer sur des terrains variés et parfois difficiles. Ce progrès repose sur l’alliance d’une agilité et d’une puissance de calcul embarquée. Dans ce domaine, Unitree Robotics développe des robots quadrupèdes et humanoïdes. L’entreprise conçoit des machines capables d’évoluer dans différents environnements extérieurs et intérieurs grâce au progès de la mécanique et du contrôle.
Au-delà de la mobilité, les travaux actuels portent sur la stabilité et la perception des robots. L’objectif consiste à améliorer la fiabilité de la vision artificielle tout en adaptant ces systèmes à des différents usages. Leur usage s’étend de la surveillance technique à certains environnements urbains. Cette évolution accompagne l’entrée de ces robots dans des contextes d’expérimentation et d’opérations réelles.

Origines et évolution de Unitree Robotics
Unitree Robotics apparaît en 2016 à Hangzhou, fondée par Wang Xingxing, dans un contexte mêlant formation technique et développement entrepreneurial. L’entreprise s’appuie sur des travaux initiaux en robotique quadrupède pour réaliser ses premiers robots. Dès sa création, elle se concentre sur les modèles performants.
Son évolution suit une évolution continue, des machines de laboratoire vers des modules commercialisés. Unitree Robotics a conçu ces premiers robots pour la recherche et l’ingénierie avant d’être déclinés en plusieurs générations, dont la gamme Go. Ces systèmes servent notamment à valider le contrôle moteur et la stabilité dynamique.
L’orientation produit met ensuite l’accent sur la réduction des coûts et l’amélioration des performances. Cette logique se retrouve dans l’évolution des modèles quadrupèdes et humanoïdes. L’entreprise revendique un équilibre entre intégration matérielle et accessibilité.
Les valeurs techniques et l’approche produit de Unitree
Unitree développe des robots quadrupèdes et humanoïdes centrés sur la locomotion et la perception en environnement réel. Les modèles intègrent des systèmes de navigation et d’adaptation au terrain. Les modèles sont capables d’effectuer des mouvements sur différents types de surfaces.
Les robots disposent des systèmes de contrôle en temps réel associés à des capteurs pour la stabilité et la navigation. Les robots de la gamme Go intègrent des fonctions de suivi de direction et de déplacement autonome dans des environnements variés. Ces systèmes combinent traitement embarqué et perception multi-capteurs.
La recherche, l’éducation et le développement utilisent également ces robots. Elles servent à l’expérimentation en déplacement et en perception robotique. Les humanoïdes se basent sur la locomotion bipède et les démonstrations de mouvement.
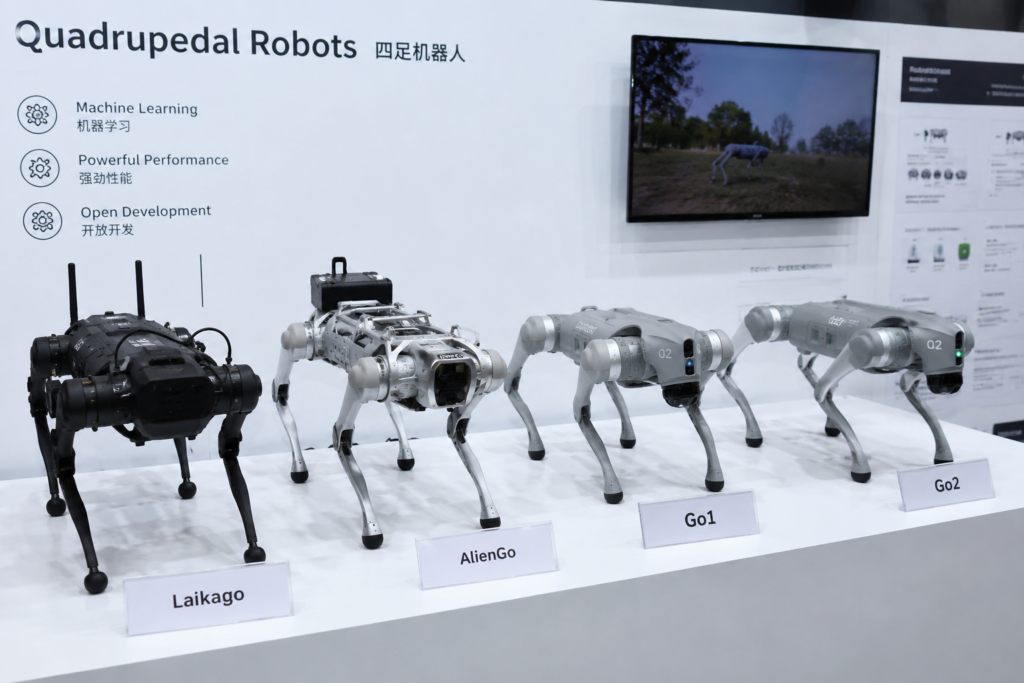
Les modèles quadrupèdes phares : Laikago, AlienGo, Go1 et Go2
Les premiers robots incluent Laikago et AlienGo. Unitree a conçu Laikago comme une machine orientée recherche et développement. AlienGo est quant à lui destiné à l’ingénierie et l’expérimentation. Ces systèmes reposent sur des outils de contrôle du mouvement.
Le Go1 constitue une évolution orientée vers la recherche et l’éducation. On l’utilise pour des applications de locomotion quadrupède et de navigation autonome. Le robot intègre des fonctions de contrôle adaptées à des environnements variés.
Le Go2 poursuit cette évolution avec un système amélioré. Il intègre des capteurs et des outils de contrôle pour le déplacement dans différents environnements. Les configurations permettent une adaptation à des usages intérieurs et extérieurs.
Go1 et Go2 : adoption, accessibilité et retombées
Le Go1 est largement utilisé dans des contextes de recherche, d’éducation et de développement. Des institutions et des équipes qui travaillent sur la locomotion à quatre pattes et les systèmes de perception en sont les principaux usagers. On l’utilise pour l’expérimentation en robotique mobile.
Les démonstrations publiques du Go1 et du Go2 sont réalisées lors des présentations officielles. Elles montrent des capacités de déplacement, de stabilité et de navigation dans différents environnements. Ces essais mettent en avant les fonctions de perception et de contrôle embarqué.
Les usages incluent également la recherche, l’éducation et le développement d’applications robotiques. Certaines entreprises les utilisent par ailleurs pour tester différents algorithmes. Les humanoïdes complètent cet écosystème comme plateformes de recherche en bipédie et en manipulation.

Transition vers les humanoïdes : prototypes H1 et modèle G1
Ces modèles incluent entre autres le H1. Il est conçu comme un robot humanoïde de taille réelle capable de marcher et courir dans des environnements complexes. Il intègre des systèmes de perception 3D incluant LiDAR et caméra de profondeur.
Le H1 se démarque par ses capacités de mouvement dynamique et de contrôle avancé. Il peut atteindre une vitesse de déplacement allant jusqu’à 3,3 m/s selon ses spécifications. On l’utilise souvent comme plateforme de recherche en locomotion bipède.
Enfin, le G1 est un humanoïde de type “AI avatar”. Il intègre des composants articulés et des systèmes de contrôle du mouvement. Il utilise des approches d’apprentissage par imitation pour améliorer ses comportements.
G1 en production : fonctionnalités, marché cible et prix indicatifs
Le G1 est conçu pour la locomotion bipède et la recherche en robotique. Il est destiné à des applications de développement et de démonstration en robotique humanoïde. Il intègre des systèmes de repérage et de contrôle pour le mouvement et la manipulation. Je vois ce robot comme une avancée majeure pour tester des comportements complexes en format compact.
Le marché cible comprend les laboratoires et la recherche en robotique. Le H1 est également une plateforme humanoïde de taille réelle. Les usagers utilisent l’ensemble des robots de la gamme dans des contextes de recherche et d’expérimentation.
Le prix du G1 débute autour de 16 000 USD. Les configurations avancées ne disposent pas d’une grille tarifaire publique unifiée. Les variations dépendent des configurations et des options disponibles.
Logiciels, apprentissage et écosystème développeur
Unitree fournit des outils et des SDK pour mieux utiliser ses robots. Les développeurs incluent des exemples de code pour contrôler les systèmes robotiques. Ces ressources sont utilisées dans des contextes de recherche et d’intégration.
Les méthodes utilisées reposent sur la simulation et l’apprentissage par renforcement. Ces approches améliorent les comportements de locomotion et de coordination avant les essais physiques. On les combine avec des tests sur robots réels.
L’écosystème inclut des ressources en ligne et des dépôts partagés. Certains sont d’ailleurs accessibles publiquement, tandis que d’autres restent exclusifs. On utilise ces outils pour la recherche et le développement.

Cas d’usage concrets : industrie, recherche, divertissement et éducation
En industrie, les quadrupèdes sont utilisés pour l’inspection de sites et de terrains difficiles. Ils peuvent embarquer des capteurs pour la collecte d’images et de données en environnement complexe. Ces usages impliquent cependant des contraintes de validation et de sécurité.
Puis, dans la recherche, ces robots servent à l’étude de la locomotion et des systèmes de contrôle. Ils sont utilisés comme modèles d’expérimentation pour les algorithmes de planification. Les universités les emploient pour tester des approches en robotique mobile.
Dans l’éducation et le divertissement, on utilise ces robots dans des démonstrations et des activités pédagogiques. Ils servent de support à l’apprentissage et à la sensibilisation à la robotique. Ces usages s’ajoutent aux applications de recherche et d’ingénierie.
Défis techniques, questions éthiques et réglementaires
La robustesse en environnement extérieur et l’autonomie énergétique sont des limites techniques. Les conditions réelles incluent des variations de terrain, de température et de poussière. L’endurance dépend de la gestion énergétique et de l’efficacité des actionneurs.
Les enjeux juridiques concernent la conformité, l’exportation et la responsabilité en cas d’incident. L’usage de robots mobiles dans l’espace public implique des cadres liés à la sécurité. Les acteurs doivent intégrer les restrictions locales et internationales.
Enfin, les questions éthiques portent sur l’acceptation des humanoïdes et la transparence de leurs capacités. Des contraintes sur les garanties de sécurité sont également évoquées dans différents contextes d’usage. Le secteur développe désormais des pratiques d’encadrement.
Architecture des capteurs et perception embarquée
Les robots d’Unitree Robotics reposent sur des architectures intégrant plusieurs types de capteurs. Ces systèmes combinent des capteurs visuels, des capteurs et des unités de mesure inertielle pour analyser l’environnement. Cette combinaison de données permet de construire une image de l’espace environnant.
Les systèmes embarqués traitent ces informations pour adapter les mouvements en temps réel. Les programmes de contrôle utilisent ces données pour ajuster l’équilibre, la trajectoire et la stabilité lors des déplacements. Cette intégration est utilisée lors des déplacements sur terrains variés.
L’évolution des capteurs s’accompagne de l’augmentation des capacités de calcul embarqué. Les modèles récents intègrent des unités de traitement plus efficaces et des systèmes plus complets. Cette évolution permet un traitement plus rapide des données issues des capteurs.
Différences quadrupèdes vs humanoïdes
Les robots quadrupèdes reposent sur une structure à quatre appuis. Cela facilite la stabilité mécanique et le déplacement. On l’utilise notamment dans des environnements intérieurs et extérieurs.
Les robots humanoïdes sont des machines bipèdes. Elle implique une gestion plus complexe de l’équilibre et du contrôle de posture. Elle sont utilisées dans des environnements conçus pour les humains.
Ces deux machines ont des objectifs différents. On utilise généralement les quadrupèdes sur des terrains complexes. Les robots humanoïdes sont utilisés pour effectuer des mouvements humains.
- Partager l'article :



