Une expérience menée par l'Université de Stanford prouve que le corps et l'esprit évoluent ensemble. Des créatures dotées d'intelligence artificielle, libérées au sein d'environnements virtuels, ont développé une meilleure capacité d'apprentissage en essayant de déplacer efficacement leurs corps sur des terrains complexes.
Le corps et l'esprit peuvent-ils être dissociés l'un de l'autre, ou sont-ils inextricablement liés ? La question divise les philosophes depuis l'Antiquité.
L'intelligence artificielle elle-même est souvent pensée comme une entité désincarnée, un esprit flottant dans le néant numérique. Pourtant, une expérience menée par les chercheurs de l'Université de Stanford démontre que le corps est bel est bien lié à l'esprit et que l'IA profiterait elle aussi de cette symbiose.
Les scientifiques à l'origine de cette étude parue dans le journal Nature s'interrogeaient sur le rôle qu'a joué l'interconnexion entre le corps et l'esprit dans notre évolution, du simple blob au grand singe capable d'utiliser des outils. Ils souhaitaient vérifier si le cerveau est influencé par les capacités du corps, et inversement.
Des créatures dotées d'IA et d'un corps en polygones
Pour vérifier cette théorie, ils ont conçu des créatures virtuelles dotées d'une intelligence artificielle et simulées par ordinateur. L'objectif était de vérifier si une IA peut apprendre plus rapidement en se voyant pourvue d'un corps, et s'adapter au monde plus efficacement.
L'expérience menée par ces experts est similaire aux environnements simulés utilisés depuis plusieurs décennies pour tester les algorithmes évolutifs. Il s'agit de mettre en place un espace virtuel, et d'y lâcher des créatures simulées relativement simples constituées d'assemblage de formes géométriques se déplaçant de façon aléatoire.
Après avoir mis en compétition plusieurs centaines de ces créatures, il suffit de choisir les 10 ayant réussi à se déplacer le plus loin. Il est ensuite possible de créer des milliers de variations de ces » champions » et de répéter l'opération encore et encore. À l'issue du processus, les créatures sélectionnées seront capables de se déplacer efficacement sur la surface virtuelle.
Cette méthode est ancienne, et les chercheurs de Stanford avaient besoin d'une simulation plus robuste et variable. Leur but n'était pas simplement de créer des créatures virtuelles mouvantes, mais de vérifier de quelle façon ces créatures apprennent et si certaines apprennent plus vite que d'autres.
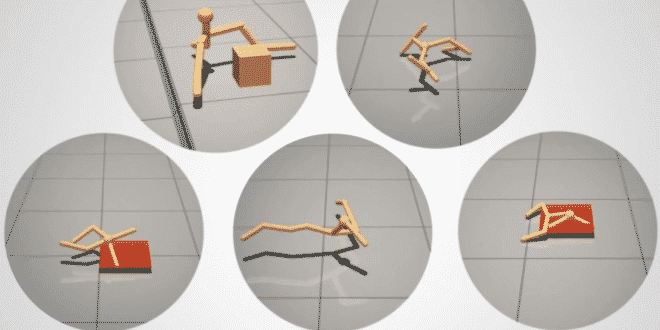
Dans un premier temps, l'équipe a donc généré des créatures simulées qu'elle a nommées » unimals « pour » universal animals » (animaux universels). Leur tâche initiale était simplement d'apprendre à marcher.
Ces créatures très simples étaient dotées d'une tête de forme sphérique, et de membres semblables à des branches. Rapidement, les unimals ont développé différentes manières intéressantes de marcher. Certains ont commencé à trébucher vers l'avant, d'autres ont adopté une démarche semblable à celle d'un lézard, et d'autres encore ont eu l'idée de se mouvoir à la manière d'une pieuvre sur la terre ferme.
Jusqu'alors, l'expérience était en tout point similaire aux méthodes de test traditionnelles d'algorithmes évolutifs. Toutefois, les chercheurs ont ajouté leur grain de sel.
Les créatures entraînées sur des terrains complexes apprennent ensuite plus rapidement

Certains unimals ont été placés dans des environnements différents, avec par exemple des collines ondulantes ou des barrières à enjamber. Dans la deuxième phase de l'expérience, les créatures entraînées sur des environnements altérés ont été mises en concurrence sur des tâches plus complexes. Le but étant de vérifier si l'adversité leur a permis de développer une meilleure adaptabilité.
Comme l'explique Agrim Gupta, co-auteur de l'étude, » presque tous les précédents travaux dans ce domaine se basaient sur des agents ayant évolué sur un terrain plat très simple. De plus, il n'y avait pas réellement d'apprentissage puisque le comportement de l'agent n'était pas appris via des interactions sensorimotrices directes avec l'environnement « .
En d'autres termes, » ils ont évolué en survivant, mais n'ont pas réellement appris en faisant. Pour la première fois, nos travaux permettent l'apprentissage et l'évolution en simultané dans des environnements complexes comme des terrains avec des marches, des collines et des mouvements « .
Les dix meilleurs unimals de chaque environnement se sont vus confiés des tâches plus complexes comme enjamber de nouveaux obstacles, déplacer une balle vers un but, pousser une boite en haut d'une colline ou patrouiller entre deux points.
C'est à ce stade de l'expérience que les créatures ont fait preuve d'un comportement très intéressant. Les unimals ayant appris à marcher sur des terrains variables ont appris les nouvelles tâches plus rapidement, et les ont mieux effectués que leurs rivaux habitués aux terrains plats.
Les chercheurs estiment avoir » découvert que l'évolution sélectionne rapidement les morphologies capables d'apprendre plus rapidement, permettant aux comportements appris tardivement par les ancêtres d'être exprimé plus tôt dans le temps de vie de leurs descendants « .
Et ces créatures n'ont pas simplement appris plus rapidement. Leur processus évolutionnaire a sélectionné les types corporels leur permettant de s'adapter plus rapidement et d'appliquer les leçons plus rapidement. Sur terrain plat, une démarche de pieuvre permet par exemple de se déplacer rapidement.
En revanche, sur un terrain vallonné, la configuration corporelle doit être à la fois rapide, stable et adaptable. Lors de l'épreuve finale, les créatures ayant acquis cette configuration ont profité d'un indéniable avantage. Leurs corps polyvalents leur ont permis d'appliquer les leçons assimilées par leurs esprits.
Une découverte importante pour la robotique
Selon les chercheurs, cette étude pourrait permettre » d'effectuer des expériences in silico à grande échelle pour recueillir des informations scientifiques sur la façon dont l'apprentissage et l'évolution créent coopérativement des relations sophistiquées entre la complexité de l'environnement, l'intelligence morphologique et la capacité à apprendre des tâches de contrôle « .
Concrètement, cette méthode pourrait être appliquée à la robotique. Un robot quadrupède pourrait par exemple apprendre à gravir des marches en évoluant seul dès sa création. Cette technique pourrait être plus efficace que de lui apprendre des mouvements conçus manuellement. Il y a donc un véritable avantage à laisser le corps et l'esprit évoluer en tandem.
Si vous le souhaitez, sachez que vous pouvez exécuter cette opération de simulation sur votre propre hardware. Le code et les données sont disponibles gratuitement sur GitHub. Toutefois, vous devrez utiliser un puissant cluster de machines ou vous tourner vers un conteneur sur le Cloud. Les paramètres par défaut requièrent d'exécuter le code sur 16 machines, chacune dotée d'un minimum de 72 processeurs.
- Partager l'article :


